What Norris' DNF Revealed About F1's Telemetry Blind Spot
- Tim Harmon

- 5 days ago
- 4 min read
McLaren’s 1000th Grand Prix gave us more than a lap-45 retirement — it showed why teams need a physics-aware way to detect when live telemetry stops matching reality.
The article was originally published on LinkedIn on June 10, 2026. Read the original here: LinkedIn Article

Monaco Made The Problem Visible
On McLaren’s 1000th Grand Prix weekend in Monaco, Oscar Piastri delivered fourth place while Lando Norris retired on lap 45 with a power-unit issue. McLaren said the team identified “an anomaly with the power unit” that had not appeared before the race, tried mitigation steps and steering-wheel setting changes from the cockpit, and still lost the car before the finish.
That is the kind of failure that matters to me with Project Apex. It is not just a retirement; it is a live test of whether the telemetry still reflects the car’s actual physical state as the hardware begins to drift from normal behavior.
What The Public Result Misses
From the outside, the timing screen reduces the event to “RET — Power Unit.” From the inside, the more important story is that the anomaly escaped pre-race checks, evolved in real time during the Grand Prix, and forced the team to manage an unknown failure mode.
That is the blind spot Project Apex targets. I want a physics-aware validator running alongside the normal telemetry stack, continuously asking a simple question: do the numbers still add up to something this car can physically do?
I Tested The Idea on Norris’ Monaco Lap
To explore that question, I used FastF1 to pull Lando Norris’ fastest race lap from Monaco 2026, exported the telemetry to CSV, and analyzed speed, throttle, brake, RPM, gear, and distance in MATLAB.
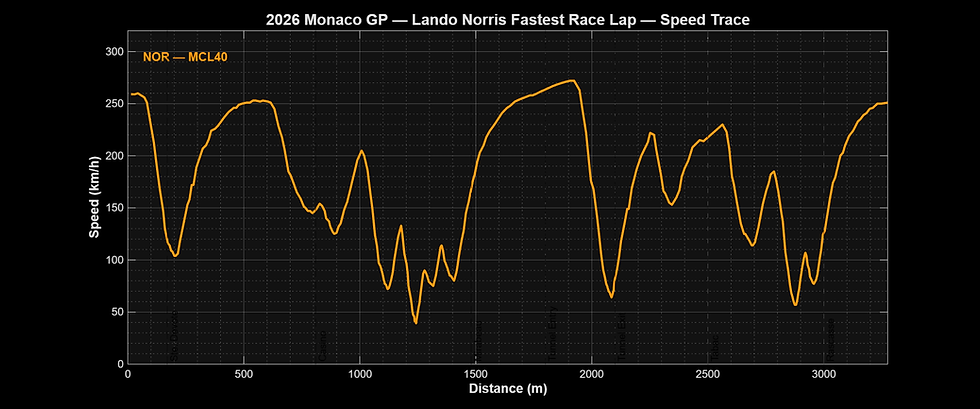
The speed trace shows the circuit’s signature immediately: heavy braking into Sainte Devote, the long acceleration through the tunnel, and the low-speed sequence through the Swimming Pool and Rascasse. The lap does not prove the later failure on its own, but it gives us a clean baseline for what a representative Monaco lap looked like before the retirement.

The throttle-and-brake trace shows where the car demands maximum commitment and where it sheds speed aggressively in a narrow operating window. Those are exactly the regions where a power-unit anomaly, sensor inconsistency, or control-state mismatch can become operationally expensive very quickly.
From Post-Race Plots to Real-Time Validation
Pretty plots do not solve the problem. A useful system needs to define a physics envelope before the session starts, then compare every live sample against both the car’s prior behavior in the event and the physical relationships that should still hold between speed, RPM, gear, acceleration, and energy state.
That is the core of Apex. If RPM and speed no longer match the known transmission state, or if the implied energy behavior no longer matches the declared control state, the system should raise a clear, explainable warning before the car reaches a terminal fault.

As a first step, I examined sampling regularity by measuring the distance between consecutive telemetry samples. In this Monaco lap, the distribution clusters around a normal step size, but several spikes break sharply away from that baseline, which is exactly the kind of integrity signal a real-time validator should surface rather than leave buried in the raw data.
Why This Matters Now
McLaren’s Monaco report describes the exact kind of problem a validation layer should help expose earlier: an unexpected power-unit anomaly that was not visible before the race and could only be managed for a limited time once it appeared. That doesn’t identify the root cause, and I am not claiming this lap-level analysis does. It does show why teams need a shared, physics-based way to see when the telemetry narrative starts diverging from the car’s physical reality.
That is why I am sharing Project Apex now. I am building an always-on, explainable telemetry-validation layer for high-stakes motorsport systems — not to replace race engineers, but to give them earlier, clearer evidence that a car is moving toward a failure state.
Why The Right People Should Care
Reliability is not a back-office concern. In modern F1, it is a competitive, operational, and safety problem that sits at the intersection of race engineering, controls, software, data integrity, and decision-making under pressure.
If you work in Formula 1, Formula E, WEC, IndyCar, or any other high-consequence series, this is the conversation I want to have: how do we detect the moment a live telemetry stream stops telling the truth? That is the problem space for Project Apex.
Thanks for reading. If you found this useful, feel free to share it with other engineers, data scientists, and motorsport folks who care about reliability and integrity as much as they do about outright speed.
Timothy D. Harmon, CISSP, is a Lead Enterprise Architect, motorsport official, and the author of Project Apex, a 2026-focused cyber-physical telemetry validation concept for Formula 1. He presented “Hacking Physics at 300 KPH” at BSides San Diego 2026 and writes at The Secure Accelerator.
References
McLaren Racing. (2026, June 6). 2026 Monaco Grand Prix — Race report. McLaren. https://www.mclaren.com/racing/formula-1/2026/monaco-grand-prix/race-report/
McLaren Racing. (2026, May 31). McLaren Racing to celebrate historic 1000th Formula 1 Grand Prix at Monaco. McLaren. https://www.mclaren.com/racing/formula-1/2026/monaco-grand-prix/monaco-1000th-gp-livery-and-grid-moment/
Formula 1. (2026, June 6). ‘We’re just not getting rewarded’ — Norris frustrated by McLaren’s ‘unlucky’ run after Monaco retirement. Formula1.com. https://www.formula1.com/en/latest/article/were-just-not-getting-rewarded-norris-frustrated-by-mclarens-unlucky-run-after-monaco
The Race. (2026, May 31). McLaren reveals special livery to mark 1000 F1 races [Photograph/article]. The Race. https://www.the-race.com/formula-1/mclaren-f1-special-livery-1000-grand-prix/
The Fast F1 Project Contributors. (2026). FastF1 (Version 3.8.3) [Software]. GitHub. https://github.com/theOehrly/Fast-F1
MathWorks. (2026). MATLAB (Version R2026a) [Software]. MathWorks. https://www.mathworks.com/products/new_products/release-highlights.html
Harmon, T. D. (2026). Project Apex telemetry figures for Monaco 2026 [Unpublished data visualizations created from FastF1 telemetry in MATLAB]. Personal work.


Comments